

Danh Mục Sản Phẩm
-
 DACO Kiến thức-Bài viết
DACO Kiến thức-Bài viết
-
 DACO Giải Pháp
DACO Giải Pháp
-
DACO Sản Phẩm
-
 Patlite
Patlite
-
Qlight
-
Đèn Còi Báo
-
 Đèn Còi Ưu Tiên
Đèn Còi Ưu Tiên
-
 Beijer
Beijer
-
Weintek
-
Proface
-
 HMI-IPC-MONITOR
HMI-IPC-MONITOR
-
 Mitsubishi
Mitsubishi
-
Thiết Bị Tự Động Hóa
-
 Korenix
Korenix
-
 ICP DAS
ICP DAS
-
 Basler Camera
Basler Camera
-
Camera Vision
-
Cognex Camera
-
 Lmark Máy In
Lmark Máy In
-
Máy in-Đầu đọc
-
 Thiết bị đo
Thiết bị đo
-
 Thủy Lực-Khí Nén
Thủy Lực-Khí Nén
-
 OTHERS
OTHERS
-
 Bơm Chân Không
Bơm Chân Không
-
Phụ kiện
Q172DSCPU-Q173DSCPU Bộ điều khiển chuyển động Mitsubishi 16/32 trục SSCNET III/H
- Mã Sản Phẩm
- : Q172DSCPU-Q173DSCPU
- Tên Sản Phẩm
- : Q172DSCPU-Q173DSCPU Bộ điều khiển chuyển động Mitsubishi 16/32 trục SSCNET III/H
- Danh Mục
- : Servo Driver
- Thương Hiệu
- : Motion Controller Mitsubishi
- Giá
-
: Liên Hệ
Q172DSCPU-Q173DSCPU Bộ điều khiển chuyển động Mitsubishi 16/32 trục SSCNET III/H
Chi Tiết Sản Phẩm
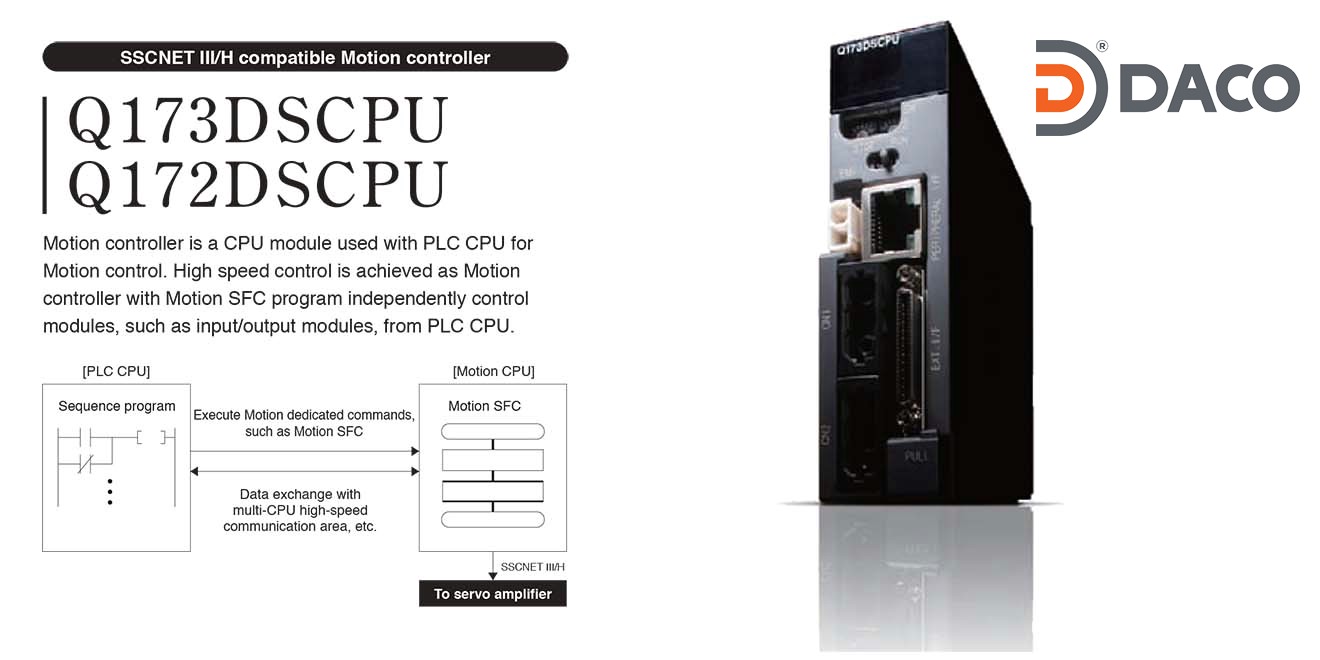
Q172DSCPU-Q173DSCPU Bộ điều khiển chuyển động Mitsubishi 16/32 trục SSCNET III/H
- Bộ điều khiển chuyển động là một mô-đun CPU được sử dụng với CPU PLC để điều khiển chuyển động. Điều khiển tốc độ cao đạt được như Bộ điều khiển chuyển động với chương trình Motion SFC điều khiển độc lập các mô-đun, chẳng hạn như mô-đun đầu vào / đầu ra, từ CPU PLC.
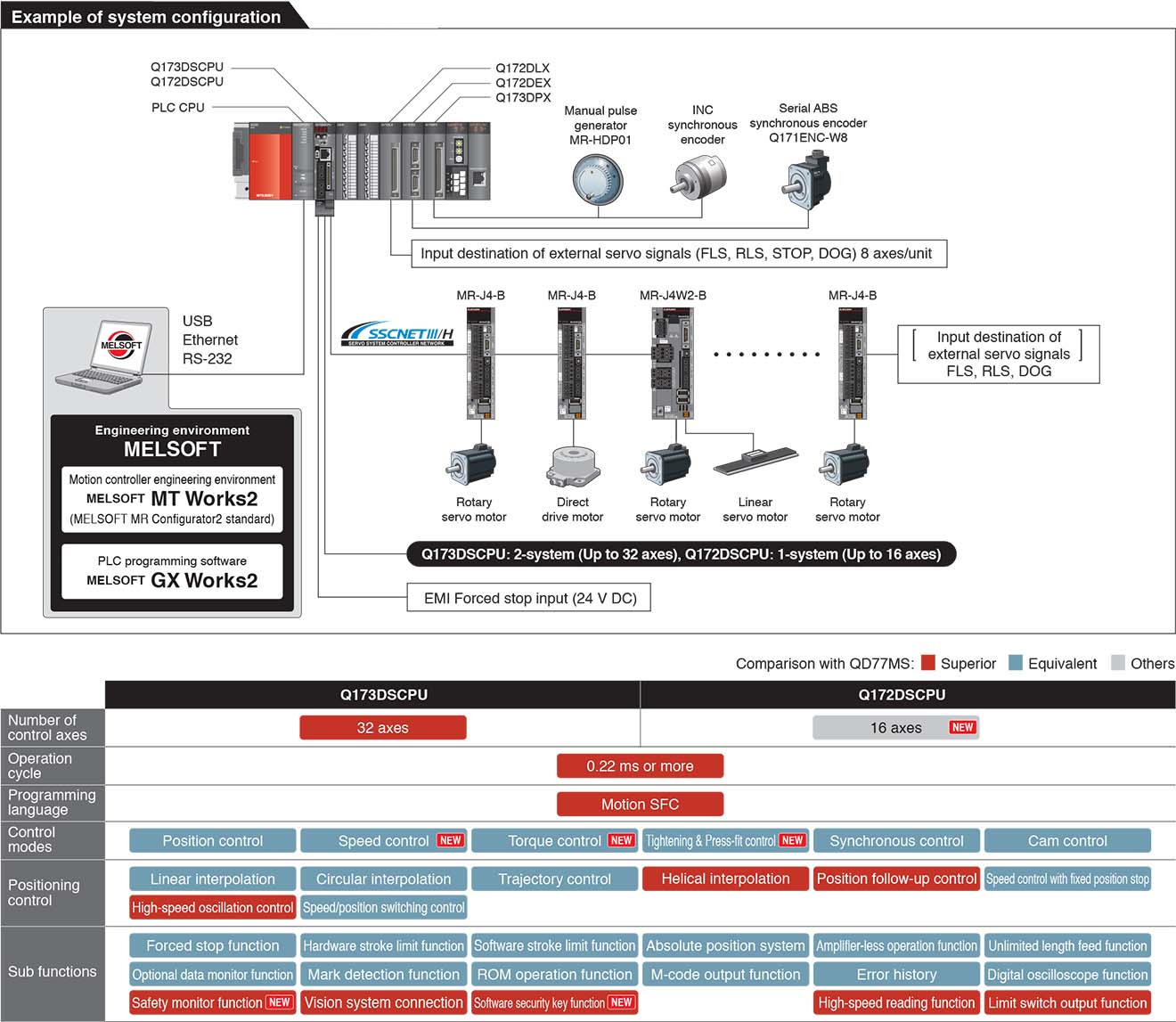
- Hỗ trợ kết nối điều khiển SSCNET III/H
- Q172DSCPU: Điều khiển 16 trục / 1 Line
- Q173DSCPU: Điều khiển 32 trục, 16 trục / 1 Line => 32 trục / 2 Line
- Sử dụng cho bộ điều khiển động cơ Servo MR-J3-B, MR-J4-B
Thông số kỹ thuật:
| Item | Q173DSCPU | Q172DSCPU | |
| Number of control axes | Up to 32 axes | Up to 16 axes | |
| Operation cycle (default) |
SV13 | 0.22ms/ 1 to 4 axes 0.44ms/ 5 to 10 axes 0.88ms/ 11 to 24 axes 1.77ms/25 to 32 axes |
0.22ms/ 1 to 4 axes 0.44ms/ 5 to 10 axes 0.88ms/ 11 to 16 axes |
| SV22 | 0.44ms/ 1 to 6 axes 0.88ms/ 7 to 16 axes 1.77ms/17 to 32 axes |
0.44ms/ 1 to 6 axes 0.88ms/ 7 to 16 axes |
|
| Interpolation functions | Linear interpolation (Up to 4 axes), Circular interpolation (2 axes), Helical interpolation (3 axes) | ||
| Control modes | PTP(Point to Point) control, Speed control, Speed-position switching control, Fixed-pitch feed, Constant speed control, Position follow-up control, Speed control with fixed position stop, Speed switching control, High-speed oscillation control, Speed-torque control, Synchronous control (SV22 (Virtual mode switching method/Advanced synchronous control method)) |
||
| Acceleration/ deceleration control |
Trapezoidal acceleration/deceleration, S-curve acceleration/deceleration, Advanced S-curve acceleration/deceleration | ||
| Compensation | Backlash compensation, Electronic gear, Phase compensation (SV22) | ||
| Programming language | Motion SFC, Dedicated instruction, Mechanical support language (SV22) (Note-1) | ||
| Servo program capacity | 16k steps | ||
| Number of positioning points | 3200 points (Positioning data can be designated indirectly) | ||
| Peripheral I/F | USB/RS-232/Ethernet (Via PLC CPU) PERIPHERAL I/F (Motion CPU) | ||
| Home position return function | Proximity dog method (2 types), Count method (3 types), Data set method (2 types), Dog cradle method, Stopper method (2 types), Limit switch combined method, Scale home position signal detection method, Dogless home position signal reference method, Driver home position return method |
||
| Home position return re-try function provided, home position shift function provided | |||
| JOG operation function | Provided | ||
| Manual pulse generator operation function | Possible to connect 3 modules (Q173DPX use) Possible to connect 1 module (Built-in interface in Motion CPU use) (Note-3) |
||
| Synchronous encoder operation function (Note-4) | Possible to connect 12 module (SV22 use) (Q172DEX + Q173DPX + Built-in interface in (Note-5) + Via servo amplifier (Note-5), (Note-6) + Multiple CPU synchronous control (Note-5)) |
||
| M-code function | M-code output function provided, M-code completion wait function provided | ||
| Limit switch output function | SV13 | Number of output points 32 points Watch data: Motion control data/Word device |
|
| Limit switch output function | SV22 | Virtual mode switching method: Number of output points 32 points Advanced synchronous control method: Number of output points 64 points ´ 2 settings Output timing compensation Watch data: Motion control data/Word device |
|
| ROM operation function | Provided | ||
| Multiple CPU synchronous control (Note-5) | Provided | ||
| External input signal | Q172DLX, External input signals (FLS/RLS/DOG) of servo amplifier, Built-in interface in Motion CPU (DI), Bit device |
||
| High-speed reading function (Note-7) |
Provided (Via built-in interface in Motion CPU, Via input module, Via tracking of Q172DEX/Q173DPX) |
||
| Forced stop | Motion controller forced stop (EMI connector, System setting), Forced stop terminal of servo amplifier | ||
| Number of I/O points | Total 256 points (Built-in interface in Motion CPU (Input 4 points) + I/O module + Intelligent function module) |
||
| Mark detection function | Mark detection mode setting | Continuous detection mode, Specified number of detection mode, Ring buffer mode | |
| Mark detection signal | Built-in interface in Motion CPU (4 points), Bit device, DOG/CHANGE signal of Q172DLX | ||
| Mark detection setting | 32 settings | ||
| Clock function | Provided | ||
| Security function | Provided (Protection by software security key or password) |
||
| All clear function | Provided | ||
| Remote operation | Remote RUN/STOP, Remote latch clear | ||
| Optional data monitor function | SSCNET III /H | Up to 6 data/axis (Communication data: Up to 6 points/axis) |
|
| SSCNET | Up to 3 data/axis (Communication data: Up to 3 points/axis) |
||
| Digital oscilloscope function | Motion buffering method (Real-time waveform can be displayed) Sampling data: Word 16CH, Bit 16CH |
||
| Absolute position system | Made compatible by setting battery to servo amplifier. (Possible to select the absolute data method or incremental method for each axis) |
||
| SSCNET communication (Note-8) |
Communication type | SSCNET III /H, SSCNET | |
| Number of lines | 2 lines (Note-9) | 1 line (Note-9) | |
| Driver communication function (Note-10) |
Provided | ||
| Number of Motion related modules | Q172DLX | 4 modules usable | 2 modules usable |
| Q172DEX | 6 modules usable | ||
| Q173DPX | 4 modules usable (Note-11) | ||
| Number of SSCNET III /H head module connection stations | Up to 8 stations usable (Up to 4 stations/line) |
Up to 4 stations usable | |
| Number of optical hub unit connections | Up to 32 units usable (Up to 16 units/line) |
Up to 16 units usable | |
Sản Phẩm Liên quan
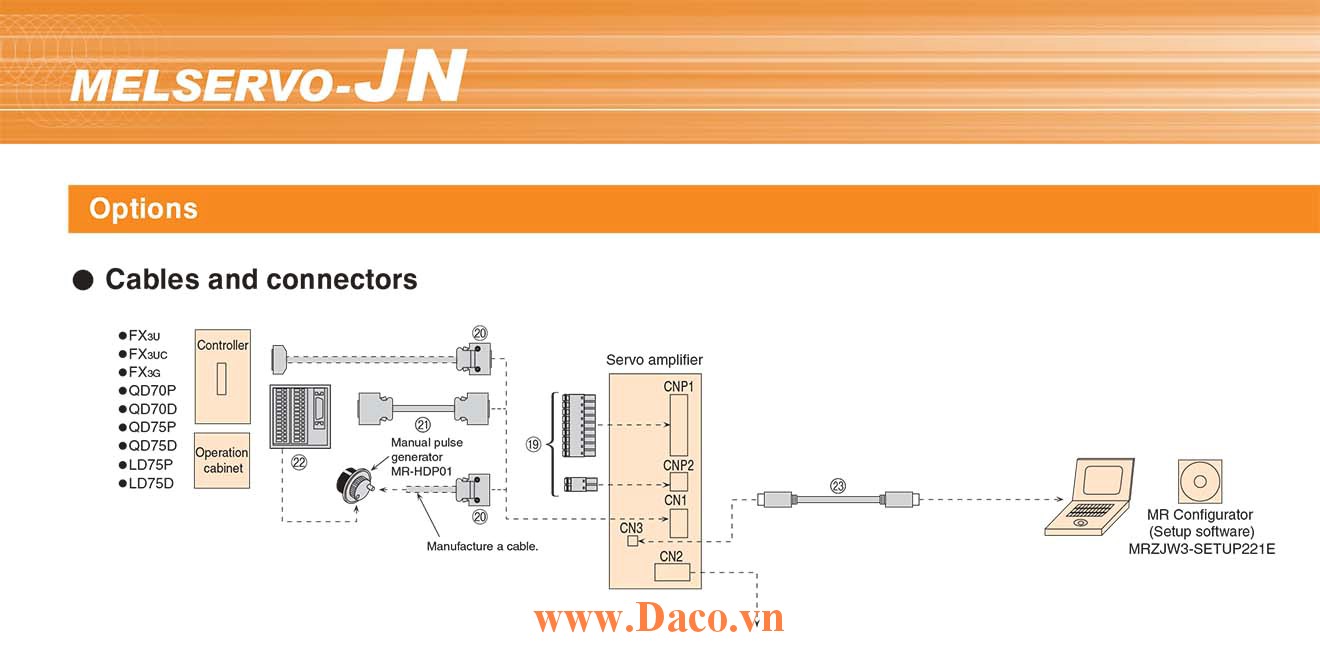
MR-JN Cáp Phanh-Bộ điều khiển Mitsubishi Servo Driver Amplifier
Liên Hệ: 0359206636
MR-JN Cáp Nguồn-Bộ điều khiển Mitsubishi Servo Driver Amplifier
Liên Hệ: 0359206636
MR-JN Cáp Encoder-Bộ điều khiển Mitsubishi Servo Driver Amplifier
Liên Hệ: 0359206636

MR-JN Bộ điều khiển động cơ Servo Mitsubishi 0.1 KW~0.4 KW, 1 Pha 220VAC/110VAC
Liên Hệ: 0359206636
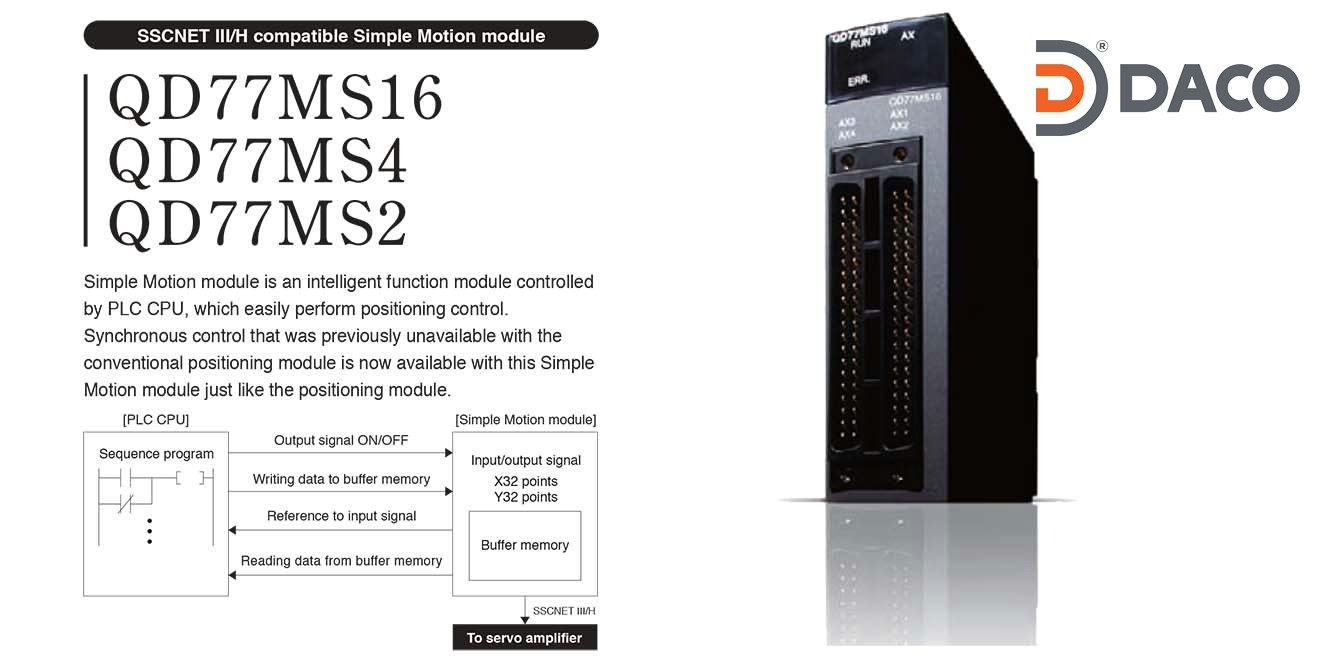
QD77MS Module điều khiển chuyển động Mitsubishi 2/4/16 trục SSCNET III/H
Liên Hệ: 0359206636
Q172DCPU-Q173DCPU Bộ điều khiển chuyển động Mitsubishi 8/32 trục SSCNET
Liên Hệ: 0359206636
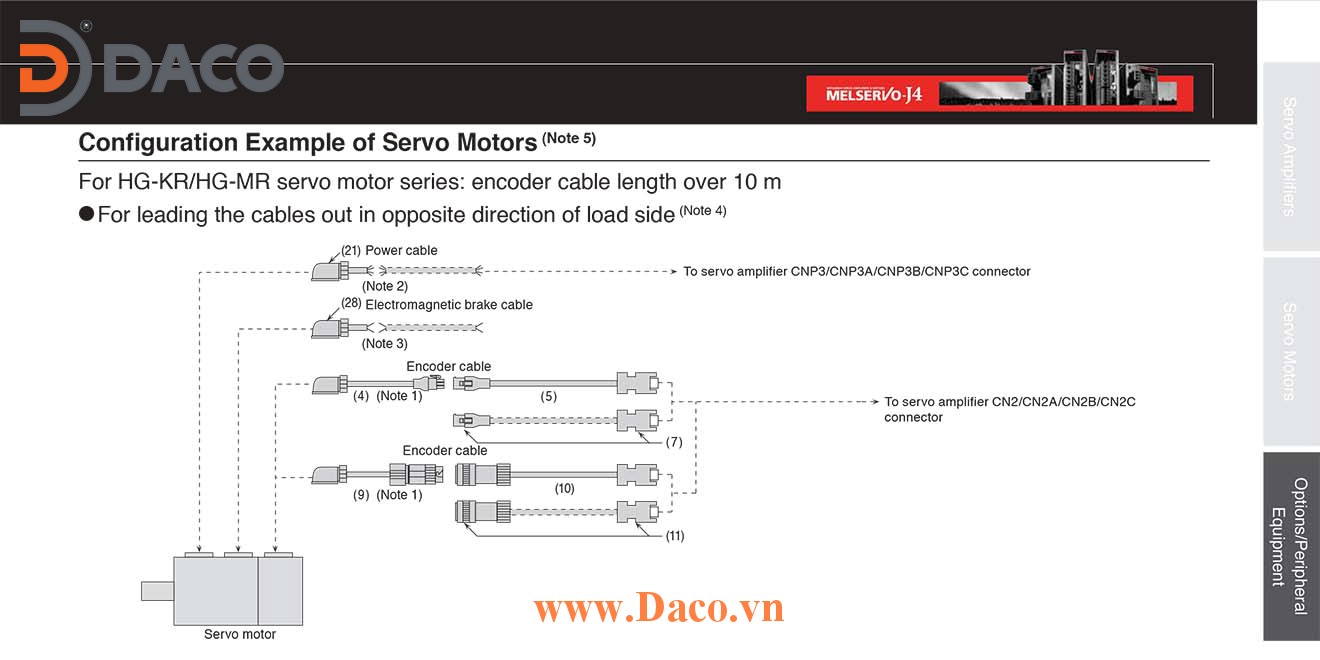
MR-J4 Cable Connector-Bộ điều khiển Mitsubishi Servo Driver Amplifier
Liên Hệ: 0359206636
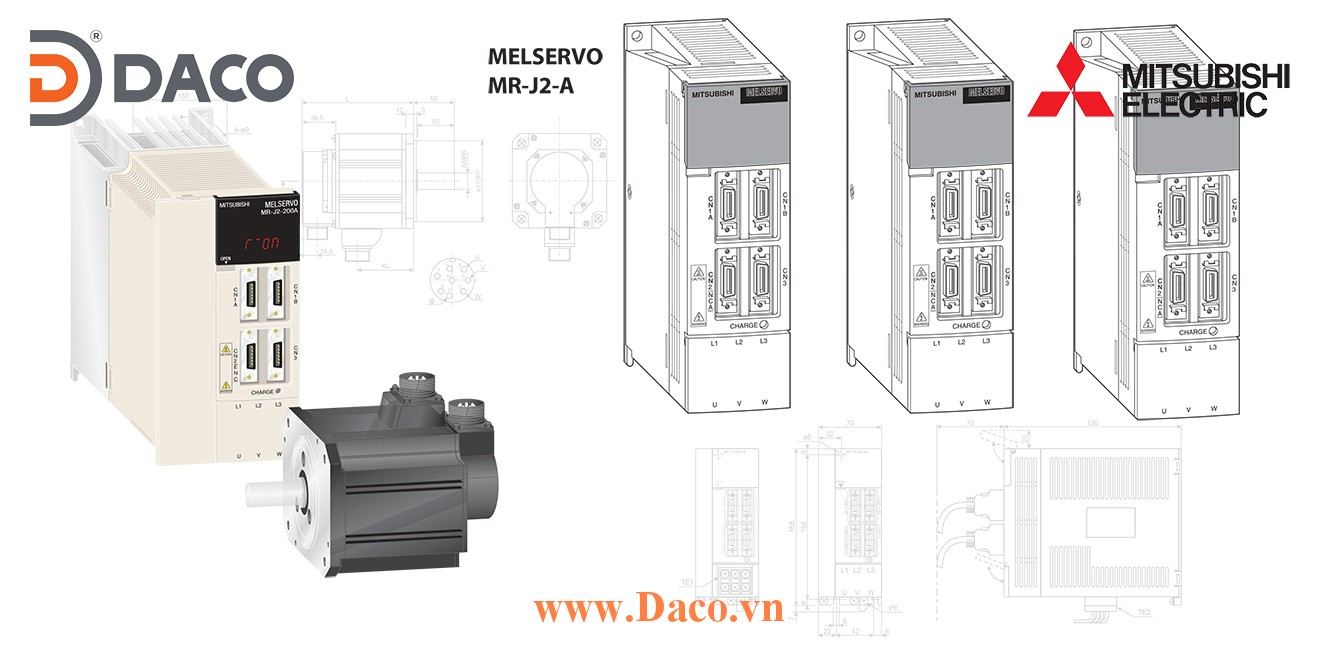
MR-J2S-A4 Bộ điều khiển Servo Driver Mitsubishi 3 Pha hoặc 380 VAC
Liên Hệ: 0359206636
Tin Mới




Sản Phẩm Nổi Bật
Triển khai hệ thống quản lý sản xuất SEEACT-MES tại nhà máy bao bì Tân Long
Liên Hệ: 0359206636
SEEACT-MES hệ thống quản lý sản xuất chuyên sâu & toàn diện #01 Việt Nam
Liên Hệ: 0359206636

Triển khai hệ thống quản lý sản xuất SEEACT-MES tại nhà máy bao bì Châu Thái Sơn
Liên Hệ: 0359206636


Giải pháp quản lý kho bằng mã vạch - Chìa khóa giảm thiểu thất thoát và lãng phí
Liên Hệ: 0359206636

5 YẾU TỐ KHÔNG THỂ BỎ QUA KHI LỰA CHỌN HỆ THỐNG MES CHO NHÀ MÁY SẢN XUẤT
Liên Hệ: 0359206636


Hệ thống MES là gì? Tại sao MES không thể thiếu đối với doanh nghiệp sản xuất?
Liên Hệ: 0359206636


Giới Thiệu
- Tư Vấn Giải Pháp Kỹ Thuật - Mr. Vũ: 0936.064.289
- Hỗ trợ kỹ thuật - Mrs. Thúy: 0904.182.235
- Nhà máy-Mrs. Vân Nguyễn: 0902.189.622
- Máy In Nhãn - Mr. Vũ: 0936.064.289
- Máy In Ống Lồng - Mr. Duy Anh: 0902286498
- Màn Hình HMI - Mr. Duy Anh: 0902.286.498
- Đèn Loa Còi Báo - Mr. Minh: 0936.135.466
- Nhà máy-Mrs. Vân Phạm: 0903.496.598
- Vision Camera Barcode-Mrs. Thúy: 0904.182.235
- Về Chúng Tôi DACO
Quy Định & Chính Sách
Thông Tin Liên Hệ
![]()
Công Ty TNHH DACO - Nhà Cung Cấp Giải pháp Quản Lý Sản Xuất, Thiết Bị Tự Động Hóa Và Dịch Vụ Kỹ Thuật Công Nghiệp
Địa chỉ: Số 146, Đường Cầu Bươu, Xã Tân Triều, Huyện Thanh Trì, Thành Phố Hà Nội
Hotline: 0359.206.636 / 0936.13.5466
Email: kinhdoanh@dacovn.com
Website: www.daco.vn
Kết Nối Với Chúng Tôi
